|
Dohyeong Kim I am currently a B.S. student in Computer Science and Engineering at Konkuk University, and an Incoming Integrated B.S./M.S./Ph.D. Student at Trustworthy Machine Learning Lab, advised by Prof. Sangwoo Hong. My research interests include Physical AI Explainability and Memory-Efficient Local Inference. |

|
🎓 Education
Konkuk University
Mar 2022 - Current
|
🌍 Experience
Trustworthy Machine Learning Lab (TML), Konkuk University
Jun 2025 - Current
Team K.A.I, Konkuk University
May 2025 - Nov 2025
|
📄 Publications |
|
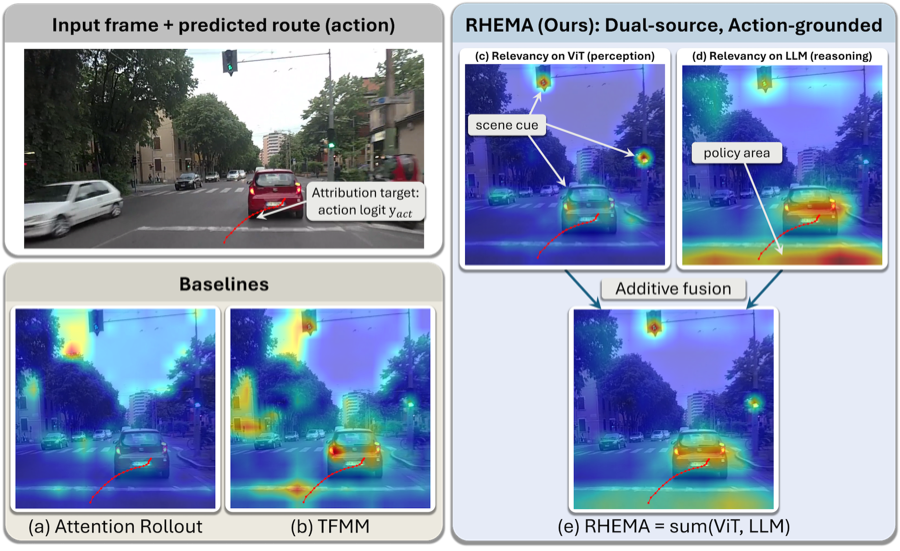
Look Where You Drive: Action-Based Visual Explanation for Autonomous Driving VLAs
Dohyoung Kim, Donghyun Kim, Jaehyuk Yu, Sangwoo Hong ECCV 2026 Submission
Proposed RHEMA, a post-hoc action-grounded visual explanation method for autonomous driving VLAs. Contributions include the y_act problem formulation, SimLingo/ReCogDrive adaptation, dual-source fusion, ablation design, and rebuttal-oriented result analysis.
|
🧪 Projects |

|
YOLO Dataset Studio
Github
A CLI workspace for custom YOLO dataset bootstrapping: ROS2 bag/video ingestion, OpenCV GUI labeling, teacher/student training, auto-labeling, split/merge/sampling, and active-learning candidate selection. Used in autonomous driving competitions.
|
✨ Awards
Kookmin University Autonomous Driving Contest
Aug 2025
2025 College Student Creative Mobility Competition
Nov 2025
1st Physical AI Hackathon
Feb 2026
|
|
|